
Meng-akses EEPROM internal AVR dilakukan dengan menggunakan global variable, diawali dengan atribut memori eeprom atau __eeprom. /* Nilai 1 disimpan dalam EEPROM saat chip programming */ eeprom int alfa = 1; eeprom char beta; eeprom long array1[5]; /* Sebuah string disimpan dalam EEPROM selama chip programming */ eeprom char string[]=”Hello”; void main(void) { int i; …
Author's posts
Nov 25
Menggunakan PID pada Robot Line Follower

Ingin membuat robot yang dapat mengikuti garis? Dengan kecepatan rendah, prosesnya cukup mudah. Jika sensor membaca arah pergerakan ke kiri, arah robot digerakkan ke kanan, demikian sebaliknya. Proses ini memiliki batasan terutama ketika kecepatan dinaikkan dan bentuk lintasan yang berkelok-kelok. Untuk kasus demikian, umumnya digunakan pengendali PID. PID singkatan dari Proportional, Integral, Derivative. Pengendali PID …
Nov 24
Line Sensor pada Line Follower
Pada aplikasi Robot Line Follower, ada sejumlah pilihan line sensor yang dapat digunakan. Yang paling sederhana menggunakan LDR, dengan menggunakan prinsip pembagi tegangan. Tipikal, LDR memiliki resistansi sekitar 1 M dalam keadaan gelap gulita, dan memiliki resistansi di bawah 1 K dalam keadaan terang benderang. Namun, LDR memiliki respons yang agak lambat, sehingga untuk line …
Nov 23
Memrogram Mikrokontroler AVR
AVR memiliki dua mode pemrograman: Parallel Programming Mode (Parallel Mode) dan Serial Downloading Mode (ISP mode). Pada Parallel Mode, divais yang akan diprogram ditempatkan pada soket pemrograman dan diperlukan tegangan 12V pada pin RESET. Komunikasi antara programmer dan divais dilakukan dengan perintah pemrograman secara paralel. Kecepatan pemrograman dua kali lebih cepat dibanding ISP Mode. Cara …
Nov 19
Sensor Temperatur LM35
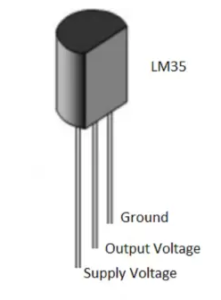
LM35 dari National Semiconductor adalah sebuah sensor temperatur centigrade presisi, yang memiliki tegangan output analog. Memiliki jangkauan pengukuran -55ºC hingga +150ºC dengan akurasi ±0.5ºC. Tegangan output adalah 10mV/ºC. Tegangan output dapat langsung dihubungkan dengan salah satu port mikrokontroler yang memiliki kemampuan ADC, misalnya ATmega8535. ADC pada ATmega8535 memiliki resolusi 10-bit, yang dapat memberikan keluaran 2^10 …
Nov 11
Pemrograman Mikrokontroler PIC dengan Bahasa C
Mikrokontroler PIC 16F877 merupakan salah satu produk dari Microchip yang sangat populer. Hadir dalam beberapa kemasan, namun yang umum beredar di pasaran umum adalah PDIP 40. Mikrokontroler ini memiliki flash 8kB, 33 buah port I/O, 8 kanal ADC dan 2 kanal PWM; sehingga cukup ideal untuk diterapkan dalam aplikasi robotika. Ada sejumlah compiler bahasa tingkat …
Oct 14
Pemrograman Mikrokontroler dengan Bahasa C
Kembali ke era kegelapan dari mikroprosesor, dimana pengembangan software dilakukan secara eksklusif dengan bahasa assembly yang spesifik dari divais tertentu. Bahasa assembly ini menggunakan mnemonic sebagai pengganti dari kode numerik bahasa mesin. Untuk menuliskan 0x12 0x07 0xA4 0x8F yang akan memerintahkan chip untuk memasukkan sebuah nilai ke sebuah lokasi memori, kita dapat menuliskannya demikian dengan …
Oct 08
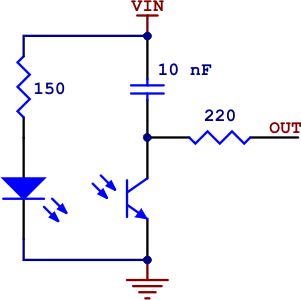
Sensor Cahaya

Sejumlah divais elektronik sederhana dapat digunakan sebagai “mata” pada robot. Photoresistor atau sel CdS (cadmium-sulfide) Sel CdS memiliki resistansi yang nilainya bergantung pada cahaya yang diterimanya. Bila tidak ada cahaya yang mengenainya, resistansi-nya sangat tinggi, sementara ketika dikenai cahaya, nilai resistansi-nya turun. Sel CdS sangat mudah dihubungkan dengan komponen elektronik lainnya, namun yang harus diperhatikan, …
Sep 30
Mikrokontroler AVR Seri Tiny
AVR Tiny merupakan mikrokontroler yang mengesankan dan ekonomis. Secara fisik cukup kecil, namun di dalamnya tidak demikian. AVR Tiny mengusung arsitektur AVR RISC yang kompatibel dengan semua mikrokontroler AVR. Mereka memiliki In System Programming (ISP), Flash Memory, Internal EEPROM dan RAM, Timer, Interupsi, Analog Comparator, ADC dan yang lainnya. Berikut adalah beberapa anggota keluarga ATtiny, …
Sep 28
Menggunakan Perintah RCTIME pada PBASIC

Dalam PBASIC, perintah RCTIME dapat digunakan untuk mengukur waktu charge dan discharge dari sebuah rangkaian resistor / kapasitor. Untuk mengukur resistansi dan kapasitansi, gunakan sensor resistif atau kapasitif seperti thermistor atau sensor kelembaban kapasitif atau potensiometer. Dalam penginderaan yang lebih luas, RCTIME dapat berfungsi sebagai stopwatch yang presisi untuk kejadian yang berdurasi sangat pendek. Ketika …